
1.Configuração elétrica
PLC:CPU1214C (SIEMENS),S7-200 SMART
IHM: KTP1200 PN Básico (SIEMENS)
Inversor: FC360
2. Software de comissionamento
Software PLC:TIA Portal V15(SIEMENS)、SMART V2.4
Software IHM:TIA Portal V15(SIEMENS)
Conversor de frequência e método de comunicação CPU: Comunicação PN Software de comissionamento do inversor: VLT_MCT10_V5.21
3. Comissionamento de ação única da máquina
1.1 Comissionamento de inicialização. (Geralmente energizado de fábrica antes do comissionamento)
1.2 "Autoajuste do motor" para gaiola, unidade de fita e motores de lagarta. Defina os seguintes parâmetros básicos para concluir o autoajuste:
| 0-01 Idioma | Inglês | Inglês |
| 1-20 Potência do motor | KW | Entrada de acordo com placa de identificação do motor |
| 1-22 Tensão do motor | V | Entrada de acordo com placa de identificação do motor |
| 1-23 Frequência do motor | Hz | Entrada de acordo com placa de identificação do motor |
| 1-24 Corrente do motor | A | Entrada de acordo com placa de identificação do motor |
| 1-25 Velocidade nominal do motor | RPM | Entrada de acordo com placa de identificação do motor |
| 1-39 Pólos do motor | Entrada de acordo com placa de identificação do motor | |
| 5-12 Terminal DI 1 entrada digital | Sem função | Sem função |
| 1-29 Ajuste automático do motor | Opção 1, autoajuste completo | Opção 1, autoajuste completo |
| 3-02 Valor mínimo de referência | 0 | 0 |
| 3-03 Valor máximo de referência | Hz | Entrada de acordo com placa de identificação do motor |
- Inatividade de ação única de cada corpo. Operação em malha aberta do inversor de controle local, monitore se a direção do codificador 16_67 é positiva ou não, caso contrário, a direção do codificador é oposta à direção do motor.
Altere a direção do encoder: 1. Troque a entrada de sinal do encoder A e o sinal B quando o inversor estiver desligado. 2. Ajuste a direção do encoder do parâmetro 5_71.
4. Configuração do parâmetro do inversor
Os parâmetros do inversor são definidos com referência à tabela a seguir
| Jaula | Lagarta | Unidade de gravação(n) | |||||
| 1-00 | 1 | 1 | 1 | ||||
| 1-01 | 1 | 1 | 1 | ||||
| 1-20 | Entrada de acordo com placa de identificação do motor | ||||||
| 1-22 | Entrada de acordo com placa de identificação do motor | ||||||
| 1-23 | Entrada de acordo com placa de identificação do motor | ||||||
| 1-24 | Entrada de acordo com placa de identificação do motor | ||||||
| 1-25 | Entrada de acordo com placa de identificação do motor | ||||||
| 1-82 | 0.5 | 0.5 | 0.5 | ||||
| 3-00 | 1 | 1 | 1 | ||||
| 3-02 | 0 | 0 | 0 | ||||
| 3-03 | Cálculo de acordo com a unidade de desenho | ||||||
| 3-41 | 1.0 | 1.0 | 1.0 | ||||
| 3-42 | 1.0 | 1.0 | 1.0 | ||||
| 4-10 | 2 | 2 | 2 | ||||
| 4-20 | 0 | 0 | 0 | ||||
| 5-12 | 2 | 2 | 2 | ||||
| 5-40 | 5 | 5 | 5 | ||||
| 5-42 | 60 | 60 | 60 | ||||
| 8-04 | 5 | 5 | 5 | ||||
| 8-10 | 0 | 0 | 0 | ||||
| 915.0 | Palavra de controle | ||||||
| 915.1 | Palavra de referência | ||||||
| 915.2 | Necessidades de projeto | ||||||
| 916.0 | Palavra de estado | ||||||
| 916.1 | Valor de feedback | ||||||
| 916.2 | Corrente do motor |
5. Programa HMI e PLC
5.1 Configuração do endereço IP da IHM: Clique em “configurações” para inserir as configurações:
5.1.1 Selecione PN/IE, clique em "propriedades" para entrar
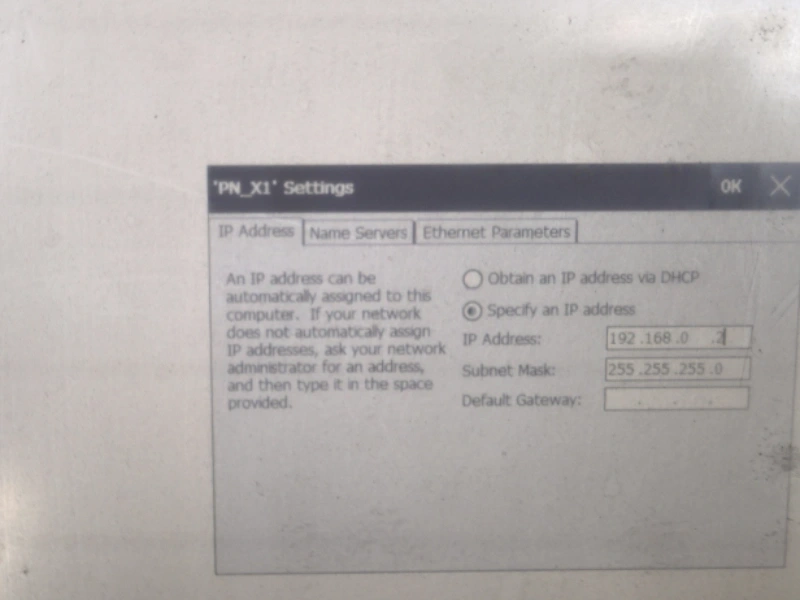
5.1.2 Configurando o endereço IP 192.168.0.2 manualmente
5.2 Download do programa HMI: Abra o projeto, selecione HMI e clique em Download. A seguinte tela será exibida:
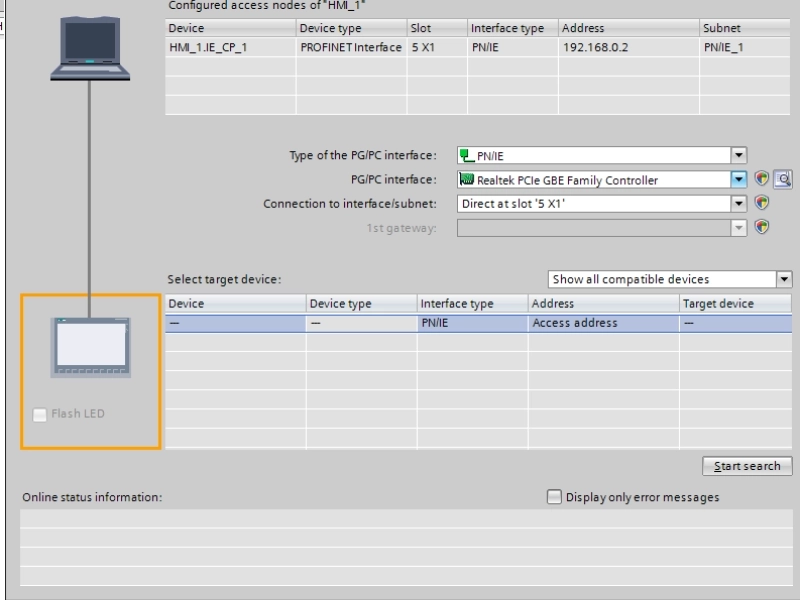
Na imagem você verá 192.168.0.2,Em seguida, selecione e clique em carregar.
5.3 Após baixar o programa observe se todos os inversores e módulos se comunicam normalmente.


Nota: O inversor de interrupção de comunicação reportará W34.
5.4 O dipswitch da unidade de freio deve ser operado com a energia desligada!


6. Ligação completa da máquina
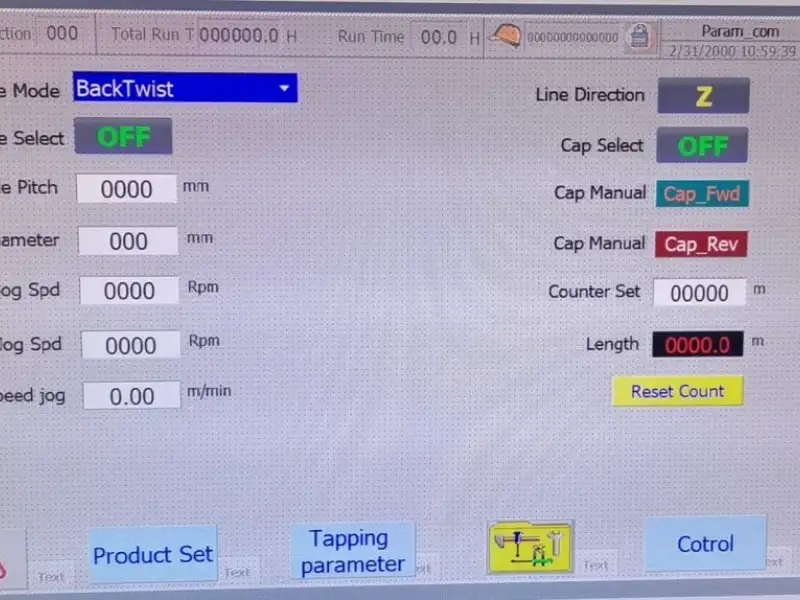
6.1 Os seguintes parâmetros devem ser definidos antes de toda a máquina ser vinculada.
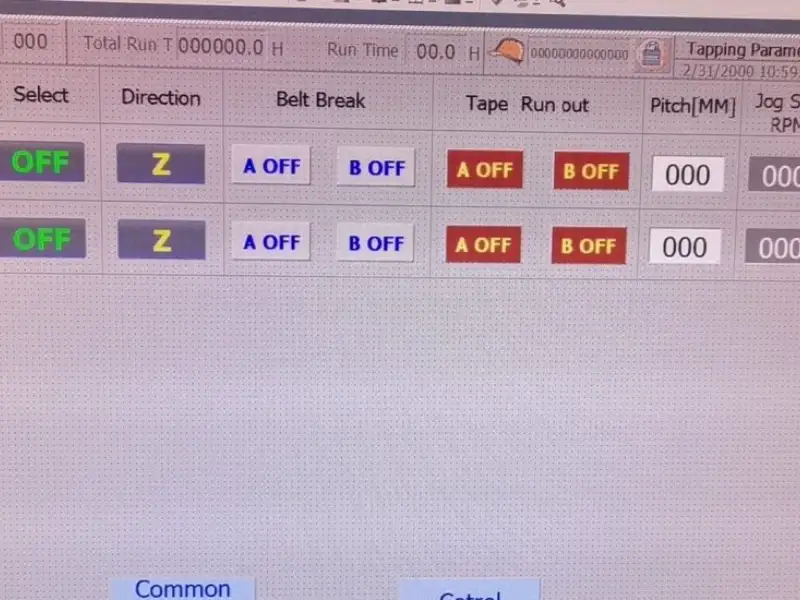
6.2 Inicie o teste da Caterpillar, gaiola e unidade de fita, por sua vez, pare para testar a direção de comutação
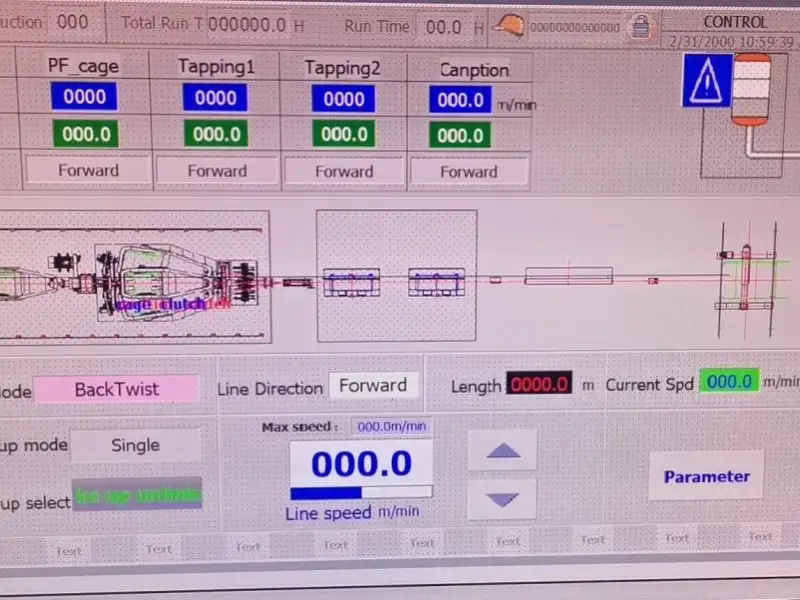
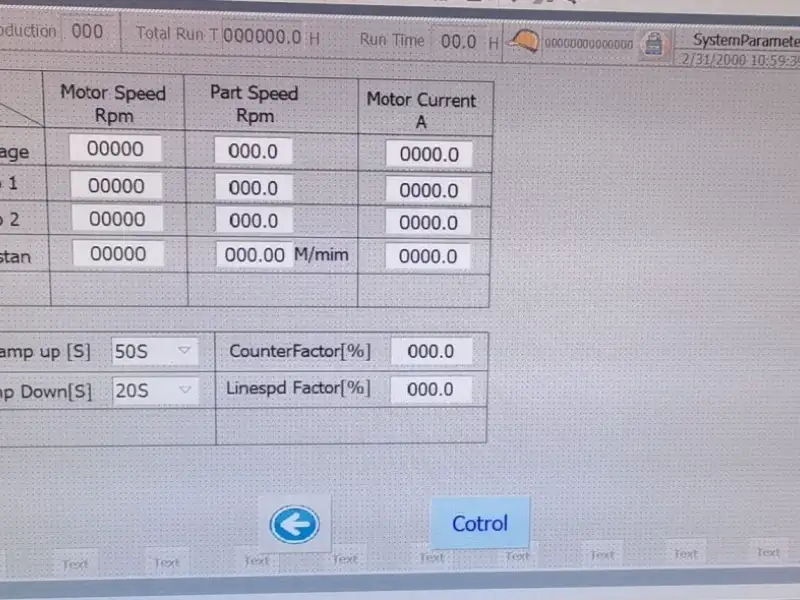
6.2.1 A máquina é observada de baixa a alta velocidade para verificar se a velocidade do motor e a corrente de cada peça estão normais.
6.2.2 Sem carga deve haver operação contínua sem falhas por mais de 2 horas antes do cabo do produto.
6.2.3Confirme se o pitch real é igual ao pitch configurado na interface e corrija se for diferente.