
1.Configuration électrique
Automate : CPU1214C (SIEMENS), S7-200 SMART
IHM : KTP1200 Basic PN (SIEMENS)
Onduleur : FC360
2. Logiciel de mise en service
Logiciel API : TIA Portal V15 (SIEMENS), SMART V2.4
Logiciel IHM:TIA Portal V15(SIEMENS)
Méthode de communication du convertisseur de fréquence et de l'UC : communication PN Logiciel de mise en service de l'onduleur : VLT_MCT10_V5.21
3. Mise en service de la machine à simple action
1.1 Mise en service à la mise sous tension. (généralement sous tension en usine avant la mise en service)
1.2 « Autoréglage du moteur » pour les moteurs à cage, à ruban adhésif et à chenilles. Définissez les paramètres de base suivants pour terminer l'auto-réglage :
| 0-01 Langue | Anglais | Anglais |
| 1-20 Puissance moteur | KW | Entrée selon la plaque signalétique du moteur |
| 1-22 Tension moteur | V | Entrée selon la plaque signalétique du moteur |
| 1-23 Fréquence moteur | Hz | Entrée selon la plaque signalétique du moteur |
| 1-24 Courant moteur | UN | Entrée selon la plaque signalétique du moteur |
| 1-25 Vitesse nominale du moteur | RPM | Entrée selon la plaque signalétique du moteur |
| 1-39 Pôles moteur | Entrée selon la plaque signalétique du moteur | |
| 5-12 Entrée numérique borne DI 1 | Pas de fonction | Pas de fonction |
| 1-29 Réglage automatique du moteur | Option 1, auto-réglage complet | Option 1, auto-réglage complet |
| 3-02 Valeur de référence minimale | 0 | 0 |
| 3-03 Valeur de référence maximale | Hz | Entrée selon la plaque signalétique du moteur |
- Ralenti simple action de chaque corps. Fonctionnement en boucle ouverte de l'onduleur à commande locale, surveillez si le sens du codeur 16_67 est positif ou non, sinon le sens du codeur est opposé au sens du moteur.
Changez la direction du codeur : 1. Échangez l'entrée du signal du codeur A et le signal B lorsque l'onduleur est hors tension. 2. Ajustez le paramètre 5_71 Direction du codeur.
4. Paramétrage de l'onduleur
Les paramètres de l'onduleur sont définis en référence au tableau suivant
| Cage | Chenille | Unité d'enregistrement(n) | |||||
| 1-00 | 1 | 1 | 1 | ||||
| 1-01 | 1 | 1 | 1 | ||||
| 1-20 | Entrée selon la plaque signalétique du moteur | ||||||
| 1-22 | Entrée selon la plaque signalétique du moteur | ||||||
| 1-23 | Entrée selon la plaque signalétique du moteur | ||||||
| 1-24 | Entrée selon la plaque signalétique du moteur | ||||||
| 1-25 | Entrée selon la plaque signalétique du moteur | ||||||
| 1-82 | 0.5 | 0.5 | 0.5 | ||||
| 3-00 | 1 | 1 | 1 | ||||
| 3-02 | 0 | 0 | 0 | ||||
| 3-03 | Calcul selon le lecteur de dessin | ||||||
| 3-41 | 1.0 | 1.0 | 1.0 | ||||
| 3-42 | 1.0 | 1.0 | 1.0 | ||||
| 4-10 | 2 | 2 | 2 | ||||
| 4-20 | 0 | 0 | 0 | ||||
| 5-12 | 2 | 2 | 2 | ||||
| 5-40 | 5 | 5 | 5 | ||||
| 5-42 | 60 | 60 | 60 | ||||
| 8-04 | 5 | 5 | 5 | ||||
| 8-10 | 0 | 0 | 0 | ||||
| 915.0 | Mot de contrôle | ||||||
| 915.1 | Mot de référence | ||||||
| 915.2 | Besoins de conception | ||||||
| 916.0 | Mot d'état | ||||||
| 916.1 | Valeur du retour | ||||||
| 916.2 | Courant moteur |
5. Programme HMI et PLC
5.1 Paramétrage de l'adresse IP de l'IHM : Cliquez sur « paramètres » pour saisir les paramètres :
5.1.1 Sélectionnez PN/IE, cliquez sur "propriétés" pour entrer
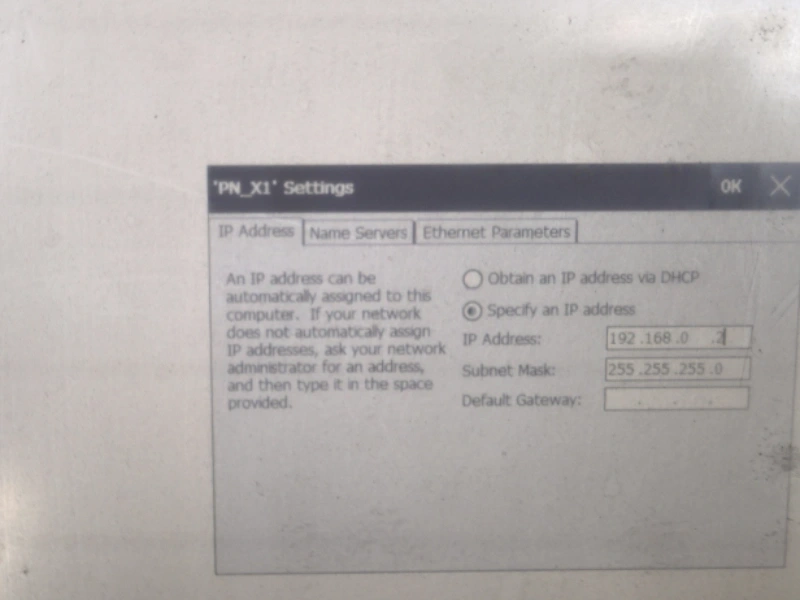
5.1.2 Définition manuelle de l'adresse IP 192.168.0.2
5.2 Téléchargement du programme HMI : ouvrez le projet, sélectionnez HMI et cliquez sur Télécharger. L'écran suivant apparaît :
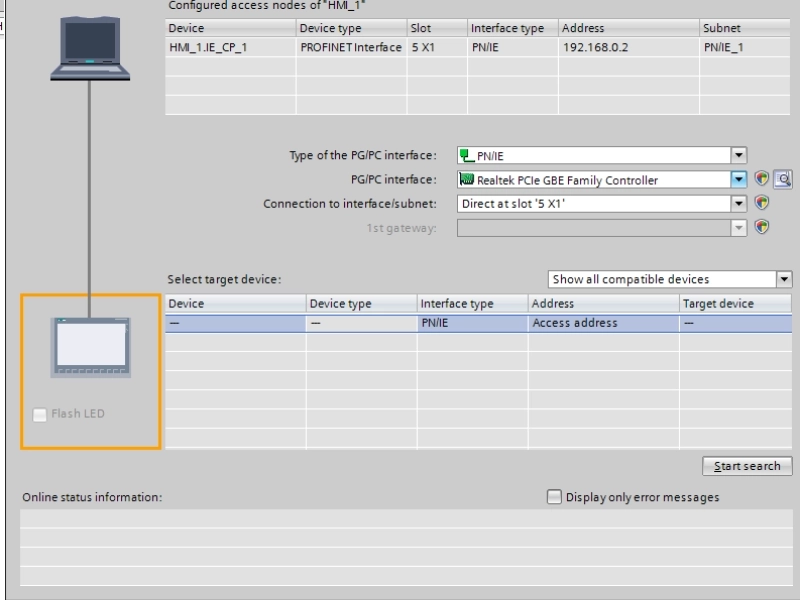
Sur l'image, vous verrez 192.168.0.2, puis sélectionnez et cliquez sur Charger.
5.3 Après avoir téléchargé le programme, vérifiez si tous les onduleurs et modules communiquent normalement.


Remarque : L'onduleur d'interruption de communication signalera W34.
5.4 Le commutateur DIP de l'unité de freinage doit être utilisé hors tension !


6. Liaison de la machine entière
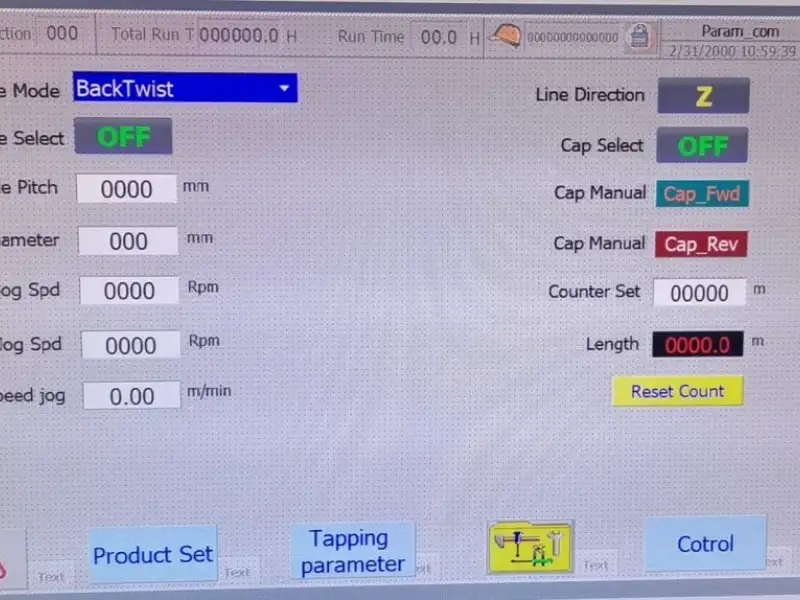
6.1 Les paramètres suivants doivent être définis avant que l'ensemble de la machine ne soit lié.
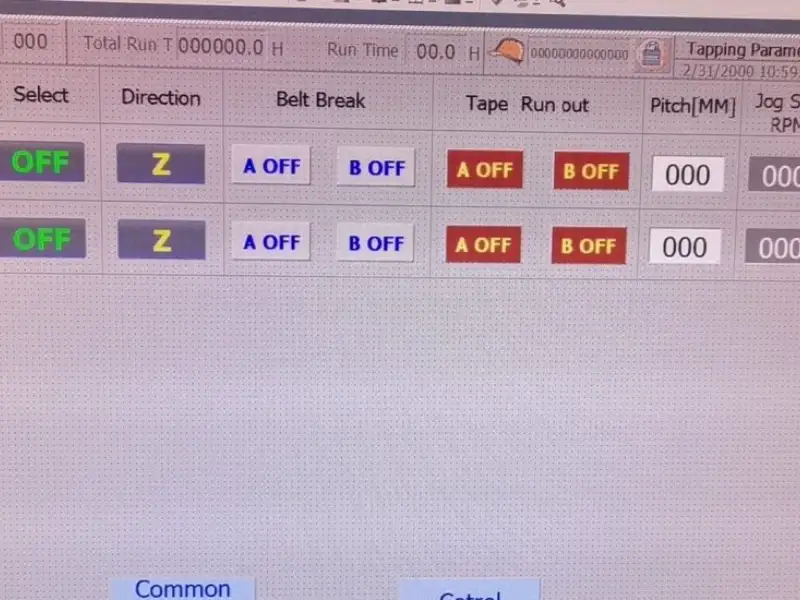
6.2 Démarrer le test de Caterpillar, de la cage et de l'unité de ruban adhésif tour à tour, arrêter pour tester le sens de commutation
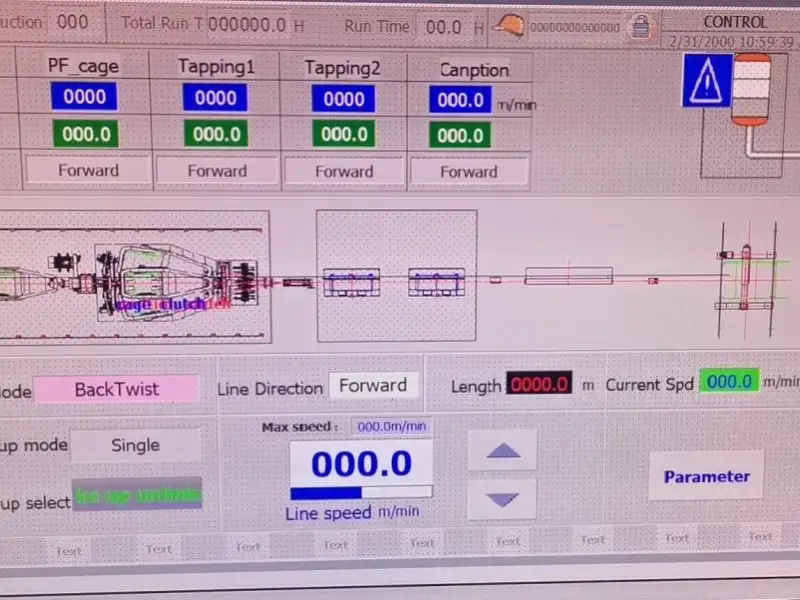
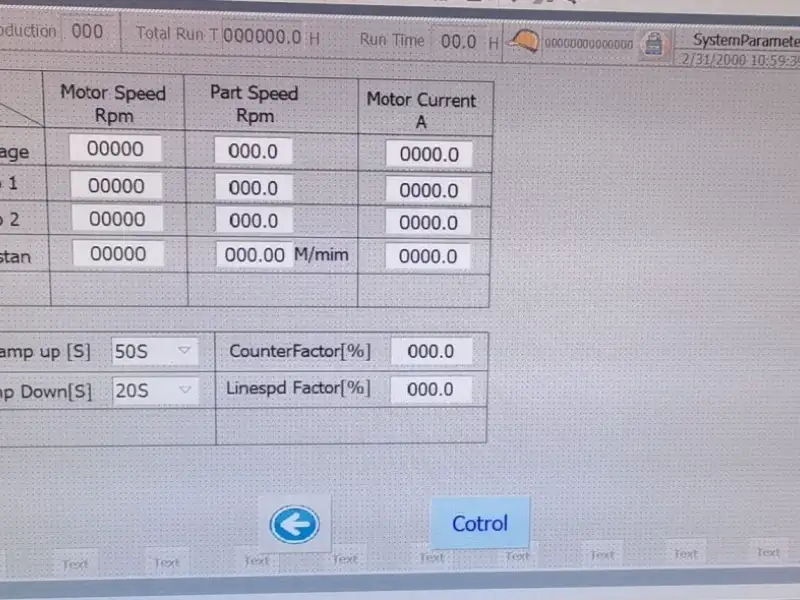
6.2.1 La machine est observée de basse vitesse à haute vitesse pour voir si la vitesse du moteur et le courant de chaque pièce sont normaux.
6.2.2 À vide, il doit y avoir un fonctionnement continu sans problème pendant plus de 2 heures avant le câble du produit.
6.2.3 Confirmez si le pas réel est le même que le pas de réglage de l'interface et corrigez s'il est différent.