
1.Configuración eléctrica
PLC: CPU1214C (SIEMENS), S7-200 INTELIGENTE
HMI: KTP1200 PN básico (SIEMENS)
Inversor: FC360
2. Software de puesta en servicio
Software PLC: TIA Portal V15 (SIEMENS), SMART V2.4
Software HMI: TIA Portal V15 (SIEMENS)
Método de comunicación del convertidor de frecuencia y de la CPU: comunicación PN Software de puesta en servicio del inversor: VLT_MCT10_V5.21
3. Puesta en marcha de la máquina con una sola acción
1.1 Puesta en marcha del toma de corriente. (Generalmente energizado de fábrica antes de la puesta en servicio)
1.2 "Autoajuste del motor" para motores de jaula, unidad de encintado y oruga. Configure los siguientes parámetros básicos para completar el autoajuste:
| 0-01 Idioma | Inglés | Inglés |
| 1-20 Potencia del motor | kilovatios | Entrada según placa de características del motor |
| 1-22 Tensión del motor | V | Entrada según placa de características del motor |
| 1-23 Frecuencia del motor | HZ | Entrada según placa de características del motor |
| 1-24 Corriente del motor | A | Entrada según placa de características del motor |
| 1-25 Velocidad nominal del motor | RPM | Entrada según placa de características del motor |
| 1-39 polos del motor | Entrada según placa de características del motor | |
| 5-12 Terminal DI 1 entrada digital | Sin función | Sin función |
| 1-29 Ajuste automático del motor | Opción 1, autoajuste completo | Opción 1, autoajuste completo |
| 3-02 Valor mínimo de referencia | 0 | 0 |
| 3-03 Valor máximo de referencia | HZ | Entrada según placa de características del motor |
- Ralentí de acción simple de cada cuerpo. Operación de bucle abierto del inversor de control local, monitoree si la dirección del codificador 16_67 es positiva o no; de lo contrario, la dirección del codificador es opuesta a la dirección del motor.
Cambie la dirección del codificador: 1. Cambie la entrada de señal del codificador A y la señal B cuando el inversor esté apagado. 2. Ajuste la dirección del codificador del parámetro 5_71.
4.Configuración de parámetros del inversor
Los parámetros del inversor se configuran con referencia a la siguiente tabla
| Jaula | Oruga | Unidad de encintado(n) | |||||
| 1-00 | 1 | 1 | 1 | ||||
| 1-01 | 1 | 1 | 1 | ||||
| 1-20 | Entrada según placa de características del motor | ||||||
| 1-22 | Entrada según placa de características del motor | ||||||
| 1-23 | Entrada según placa de características del motor | ||||||
| 1-24 | Entrada según placa de características del motor | ||||||
| 1-25 | Entrada según placa de características del motor | ||||||
| 1-82 | 0.5 | 0.5 | 0.5 | ||||
| 3-00 | 1 | 1 | 1 | ||||
| 3-02 | 0 | 0 | 0 | ||||
| 3-03 | Cálculo según la unidad de dibujo. | ||||||
| 3-41 | 1.0 | 1.0 | 1.0 | ||||
| 3-42 | 1.0 | 1.0 | 1.0 | ||||
| 4-10 | 2 | 2 | 2 | ||||
| 4-20 | 0 | 0 | 0 | ||||
| 5-12 | 2 | 2 | 2 | ||||
| 5-40 | 5 | 5 | 5 | ||||
| 5-42 | 60 | 60 | 60 | ||||
| 8-04 | 5 | 5 | 5 | ||||
| 8-10 | 0 | 0 | 0 | ||||
| 915.0 | Palabra de control | ||||||
| 915.1 | palabra de referencia | ||||||
| 915.2 | Necesidades de diseño | ||||||
| 916.0 | Palabra de estado | ||||||
| 916.1 | Valor de retroalimentación | ||||||
| 916.2 | Corriente del motor |
5.Programa HMI y PLC
5.1 Configuración de la dirección IP de la HMI: Haga clic en "configuración" para ingresar a la configuración:
5.1.1 Seleccione PN/IE, haga clic en "propiedades" para ingresar
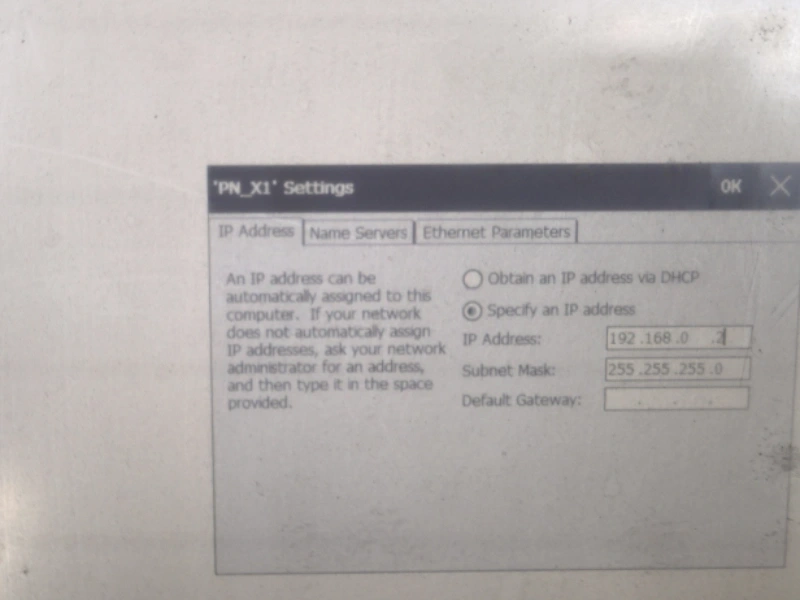
5.1.2 Configuración manual de la dirección IP 192.168.0.2
5.2 Descarga del programa HMI: abra el proyecto, seleccione HMI y haga clic en Descargar. Aparece la siguiente pantalla:
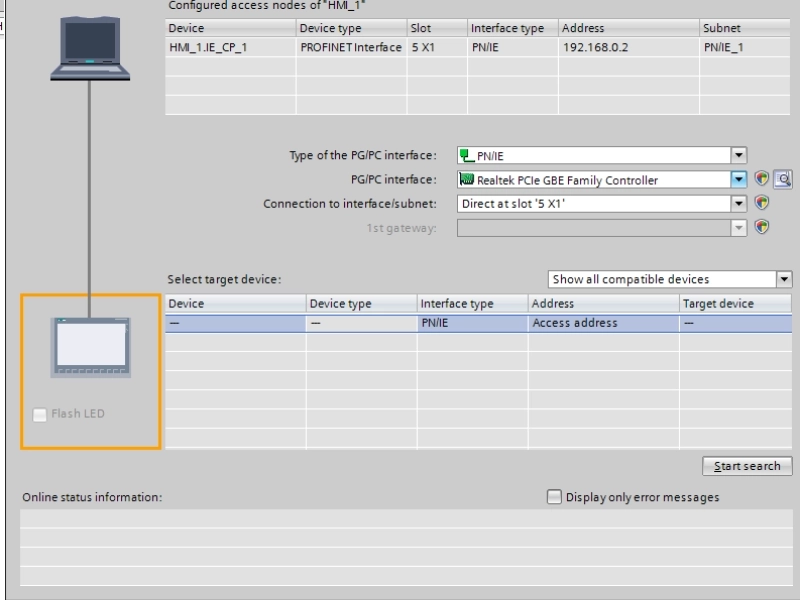
En la imagen verá 192.168.0.2, luego seleccione y haga clic en cargar.
5.3 Después de descargar el programa, observe si todos los inversores y módulos se comunican normalmente.


Nota: El inversor de interrupción de comunicación informará W34.
5.4 ¡El interruptor DIP de la unidad de freno debe operarse con la energía apagada!


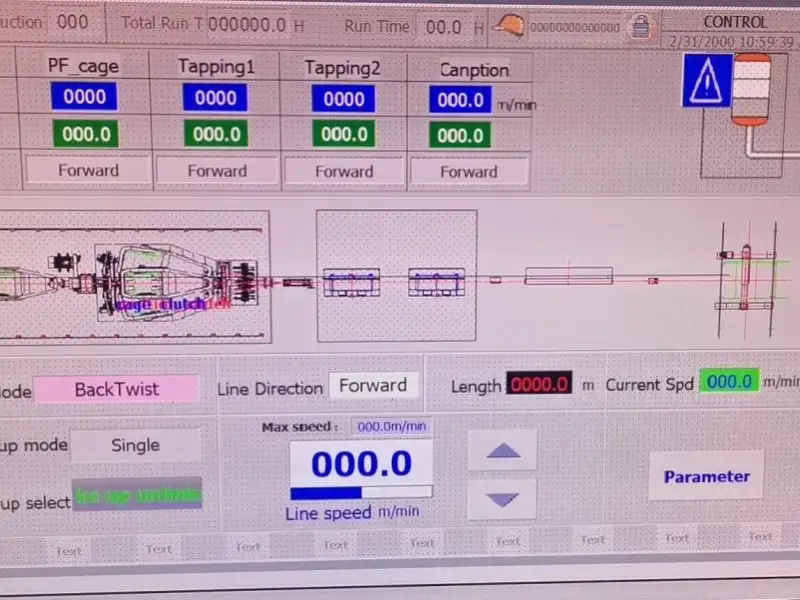
6.Vínculo de toda la máquina
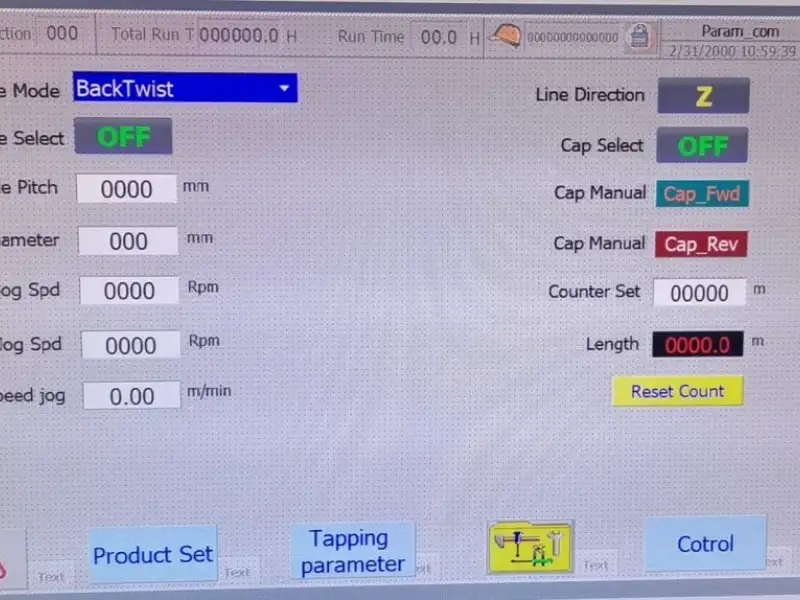
6.1 Se deben configurar los siguientes parámetros antes de vincular toda la máquina.
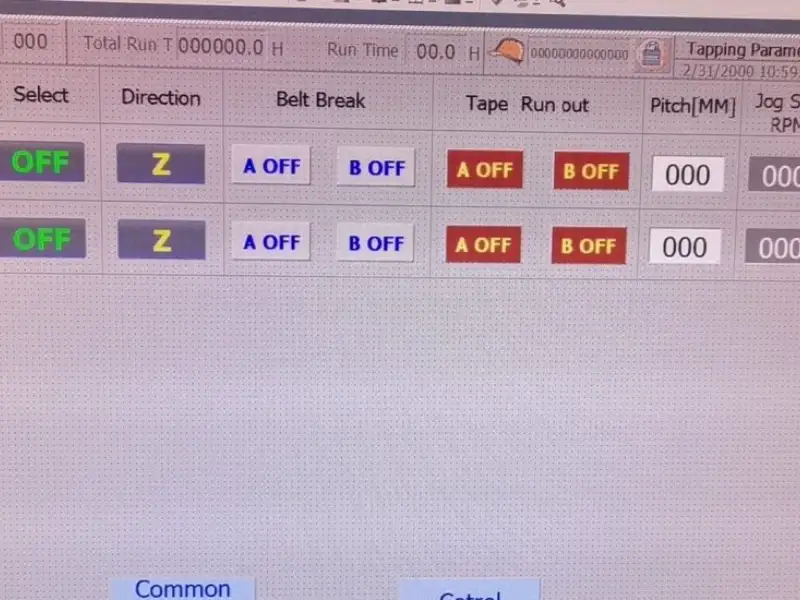
6.2 Inicie la prueba de Caterpillar, jaula y unidad de encintado por turno, deténgase para probar la dirección de conmutación
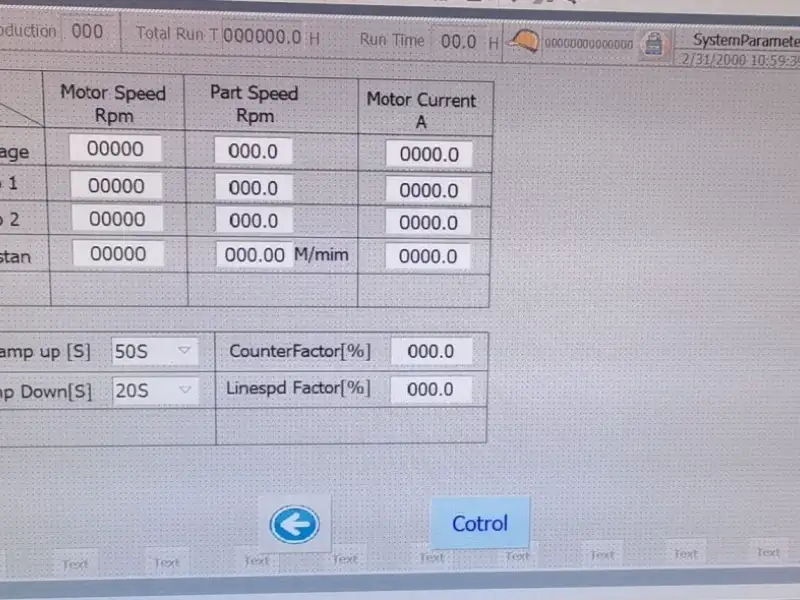
6.2.1 Se observa la máquina desde baja velocidad hasta alta velocidad para ver si la velocidad del motor y la corriente de cada pieza son normales.
6.2.2 Sin carga debe ser un funcionamiento continuo y sin fallas durante más de 2 horas antes del cable del producto.
6.2.3Confirme si el tono real es el mismo que el tono de configuración de la interfaz y corríjalo si es diferente.